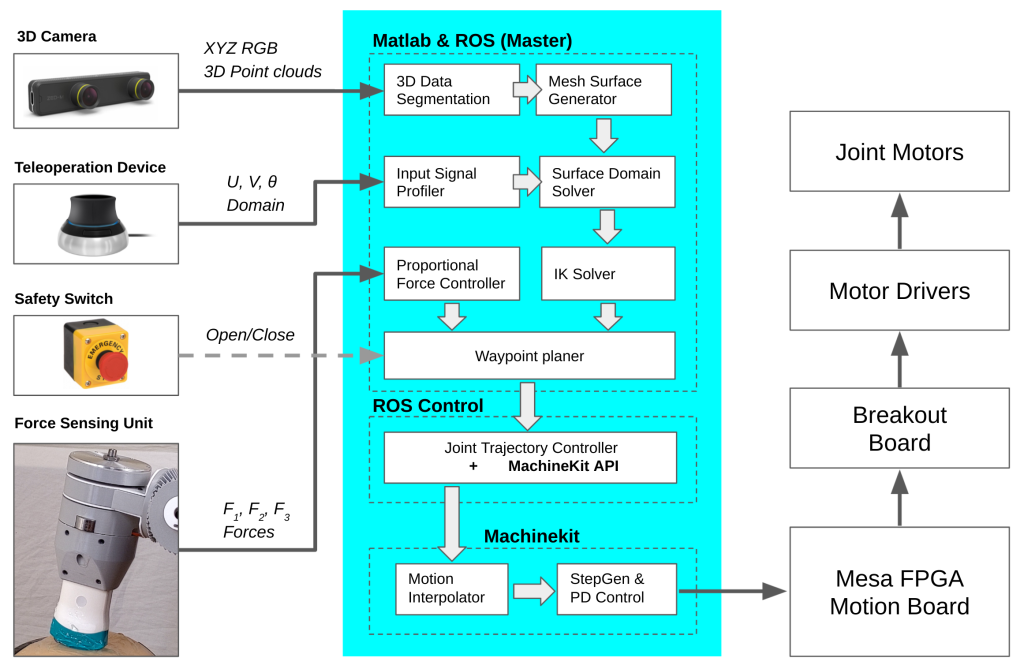
Robotic System for Diagnostic Ultrasound
Jakub Kaminski, MS Thesis at WPI
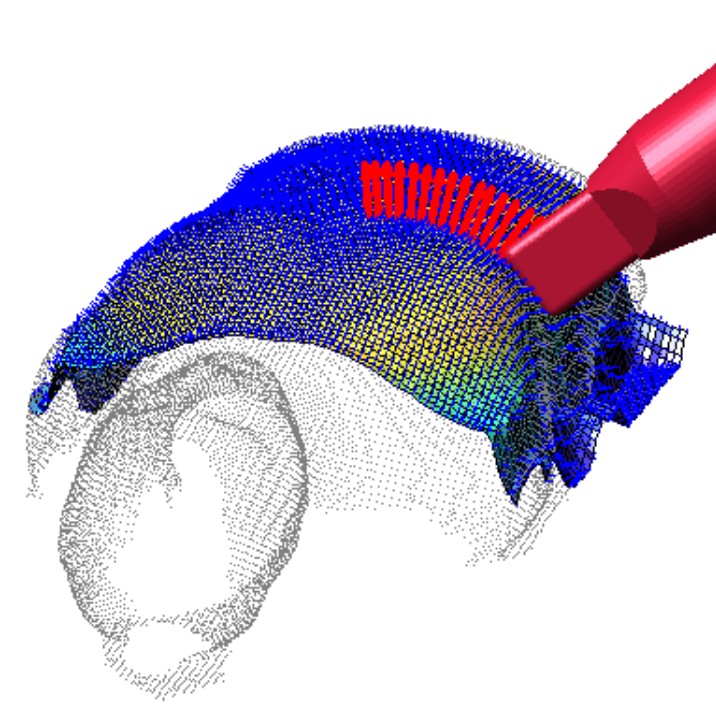
Force control over lung ultrasound phantom:
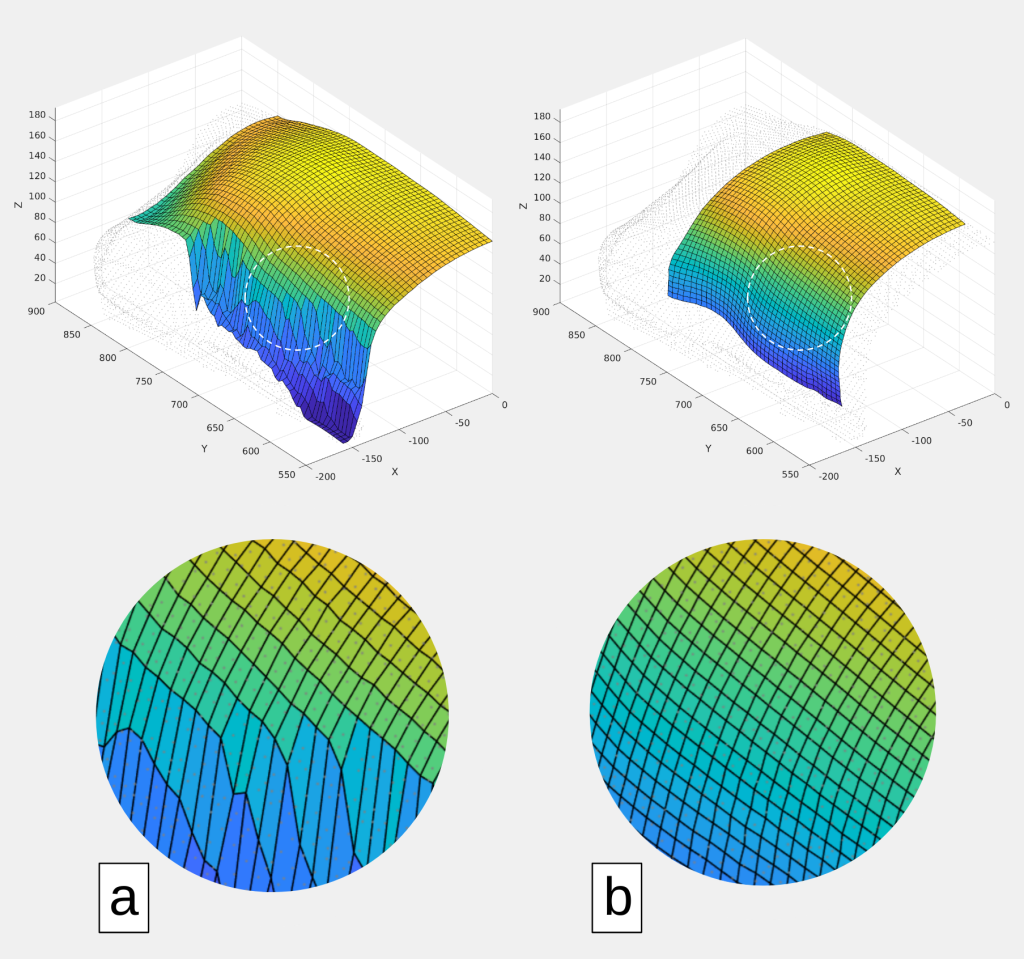
Thesis figures highlights:
[Limited project preview, full robot kinematic structure cannot be disclosed at this time.]
Jakub Kaminski, MS Thesis at WPI
[Limited project preview, full robot kinematic structure cannot be disclosed at this time.]